Интеграция с ПО RusGuard Soft🔗
ПО RusGuard Soft позволяет создавать единые интегрированные системы безопасности на объектах любой сложности и любого масштаба.
Примечание
Интеграция доступна на Windows и Linux-серверах.
Примечание
Интеграция будет работать с ПО RusGuard Soft версии 3.0.6. С другими версиями работоспособность интеграции не гарантируется.
В Macroscop можно получать события из ПО RusGuard Soft и настраивать реакцию на эти события, а также просматривать полученные события в Журнале событий приложения Macroscop Клиент.
Сайт разработчика: www.rgsec.ru
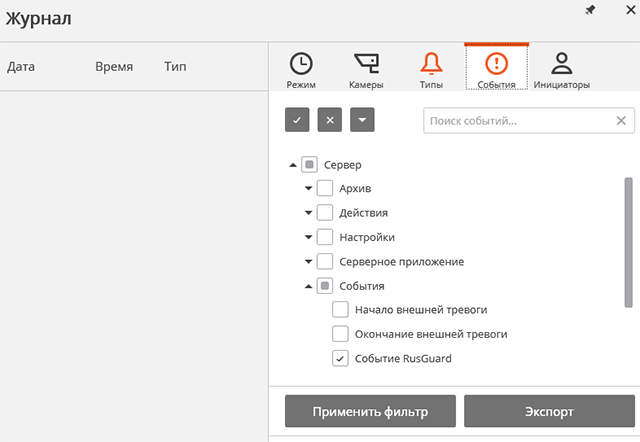
Журнал событий
Принятые события из ПО RusGuard Soft отображаются в журнале событий приложения Macroscop Клиент.
Настройка задач по событию
Для настройки действий, выполняемых в ответ на события, происходящие в системе видеонаблюдения, нужно в приложении Macroscop Конфигуратор перейти на вкладку  Автоматизация, выделить в дереве камер отдельную камеру или папку, после чего на открывшейся странице перейти на вкладку Задачи по событию.
Автоматизация, выделить в дереве камер отдельную камеру или папку, после чего на открывшейся странице перейти на вкладку Задачи по событию.
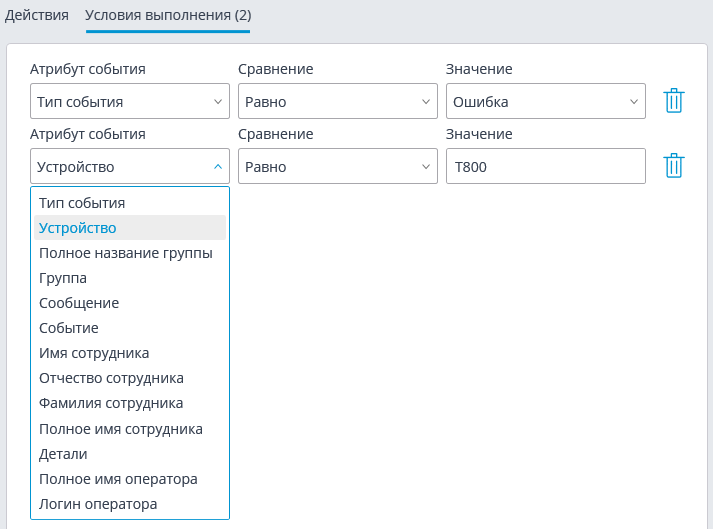
Доступна настройка любых стандартных задач по событию Событие RusGuard.
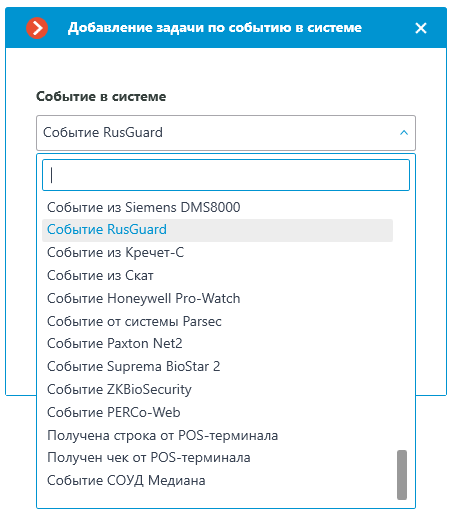
Для события можно настроить различные условия. Если задано несколько условий, то действие будет выполняться только при выполнении всех этих условий. Если не задано ни одно условие, то действие будет выполняться при получении любого события из RusGuard.
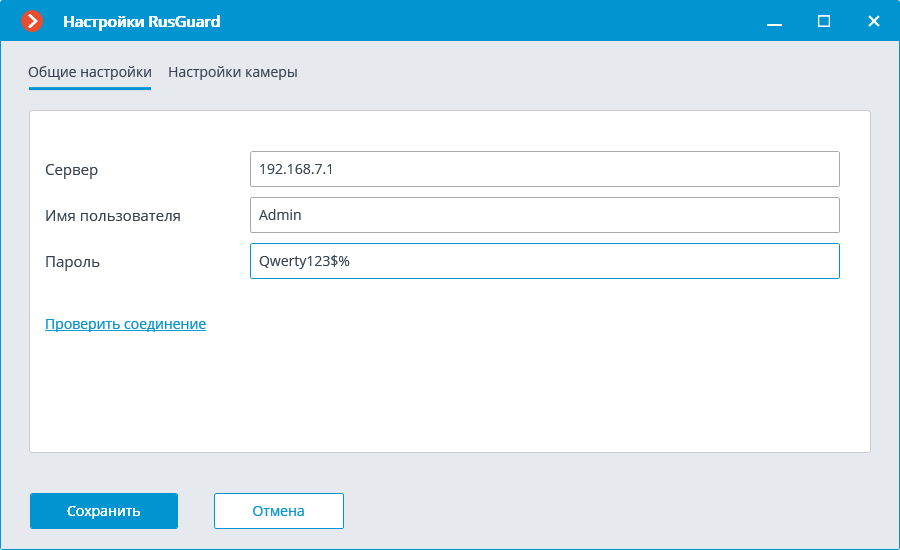
Настройка в приложении Macroscop Конфигуратор
Для того чтобы сервер Macroscop мог реагировать на события из системы RusGuard, нужно запустить приложение Macroscop Конфигуратор, перейти на вкладку Автоматизация, выделить камеру в списке, затем на открывшейся странице перейти на вкладку Интеграции и включить RusGuard.
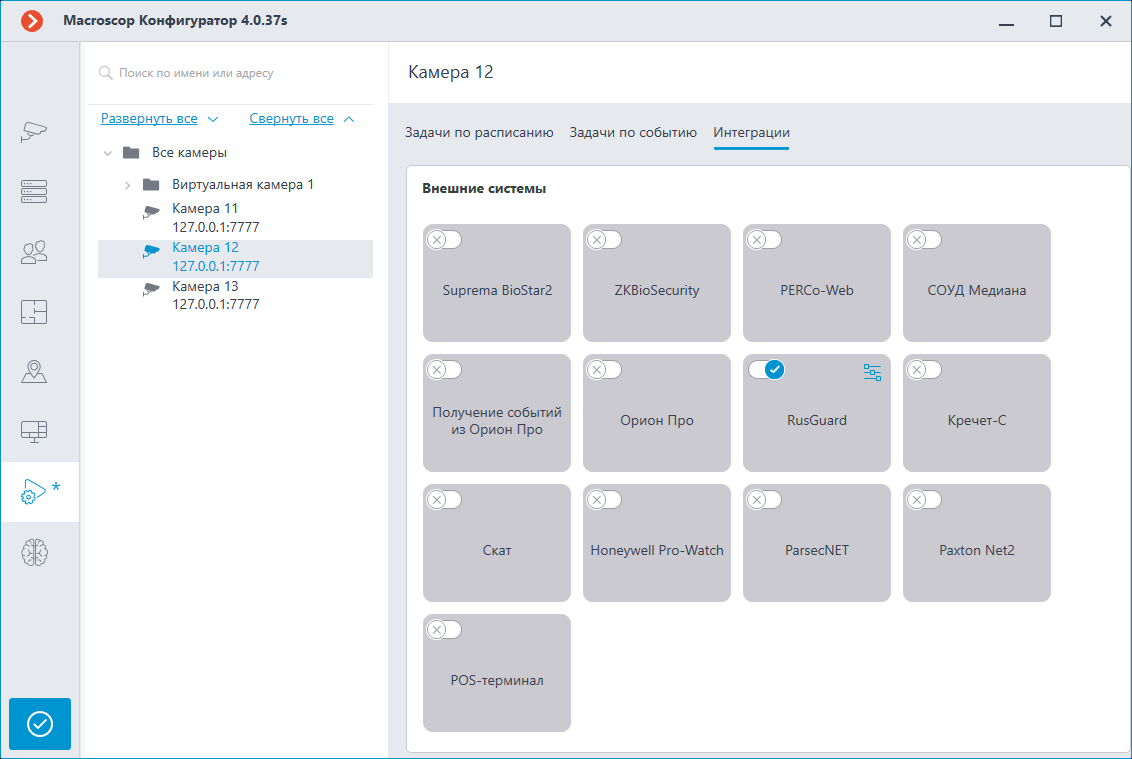
На вкладке Общие настройки выполняется общая для всей системы настройка подключения к RusGuard.