Требования и рекомендации для модуля Поиск объектов🔗
Важно
Если на одной камере используется несколько модулей видеоаналитики, следует устанавливать и настраивать её таким образом, чтобы удовлетворять требованиям всех модулей.
Например, на камере используются модуль А и модуль В со следующими требованиями:
Модуль А: Угол наклона камеры к плоскости – не менее 10°; разрешение — не менее 1024×768; частота кадров — не менее 20 кадр/с.
Модуль В: Угол наклона камеры к плоскости – не более 20°; разрешение — не менее 1920×1080; частота кадров — не менее 6 кадр/с.
В таком случае камеру нужно установить и настроить таким образом, чтобы соблюдались следующие условия:
Угол наклона камеры к плоскости – от 10° до 20°; разрешение — не менее 1920×1080; частота кадров — не менее 20 кадр/с.
Функциональные ограничения🔗
Предупреждение
После обновления Macroscop с версии 3.3 и ниже до версии 3.4 и выше модуль Поиск объектов не сможет искать объекты за период, предшествовавший обновлению. Это связано с изменением базы данных в версии 3.4.
Аппаратное и программное обеспечение🔗
Совет
Для расчёта параметров серверного и клиентского оборудования, на которых планируется запускать ПО Macroscop, используйте наш Калькулятор.
Предупреждение
Перед использованием нейросетевых возможностей модуля необходимо установить нейросетевой пакет.
Для использования данного нейросетевого модуля требуются:
Процессор с поддержкой инструкций AVX.
Видеокарта (GPU) NVIDIA с индексом вычислительной мощности (CUDA GPU Compute Capability) не ниже 6.1 и объёмом памяти не ниже 4GB; при этом характеристики и производительность видеокарты должны быть не ниже, чем у видеокарт NVIDIA серии 10. Версия драйвера видеокарты для ОС Windows — не ниже 572.61, для ОС Linux — не ниже 570.124.06.
Файл подкачки (swap) размером не менее половины от общего объёма оперативной памяти.
Подсказка
Если планируется использование модуля на виртуальной машине, может дополнительно потребоваться:
Включить поддержку AVX инструкций в настройках гостевой машины.
Использовать драйвера GRID для виртуализации GPU.
Внимание
Macroscop должен использовать выбранные для работы нейросетей видеокарты в монопольном режиме. Не допускается использование такой карты для других приложений или задач, потребляющих ресурсы GPU, в том числе для отображения видео. Одновременное использование видеокарты для нескольких задач может привести к некорректной работе системы: от снижения производительности аналитики до нестабильной работы сервера.
Предупреждение
Одновременное выполнение задач отображения видео и его анализа модулями Распознавание лиц (Complete) или Подсчёт уникальных посетителей, работающими на основе пакета Macroscop Нейросети Standard, может вызвать значительное увеличение задержки распознавания лиц при использовании видеокарт серий GTX 10XX и GTX 16XX с 4 ГБ видеопамяти и менее. Рекомендуется использовать для этих задач раздельные видеокарты.
Предупреждение
Нейросеть работает только в 64-битной версии Macroscop.
Важно
При обновлении Macroscop до другой версии необходимо также обновить до соответствующей версии нейросетевой пакет.
Для поиска только движущихся объектов и людей видеокарта не используется.
Предупреждение
При использовании видеокарты стабильная работа модуля гарантируется только на операционных системах Windows 10, Windows Server 2016, Ubuntu 20.04, а также на более новых версиях указанных операционных систем.
На других операционных системах (Windows 8, Windows Server версий 2008 и 2012, Debian, Astra Linux) могут возникнуть проблемы при попытках использовать видеокарты NVIDIA. На Windows 8 это связано с прекращением поддержки драйверов видеокарт NVIDIA. На Debian и Astra Linux проблема заключается в высокой сложности установки работоспособных версий драйверов видеокарт.
Использование модуля на сервере видеоаналитики🔗
Указанные в этой статье требования и ограничения распространяются на любой сервер, на котором будет использован данный модуль: как на обычный сервер видеонаблюдения, так и на сервер видеоаналитики.
В то же время, при использовании модуля на сервере видеоаналитики требуется установить нейросети как на сервер видеонаблюдения, так и на сервер видеонаблюдения, который принимает видео с камеры и хранит видеоархив. Это обусловлено использованием на обоих серверах базы данных, которая устанавливается при установке нейросетей.
Видеопоток🔗
Для режимов, использующих нейросети:
Частота кадров — не менее 3 кадров в секунду.
Разрешение — не ниже HD (1280x720).
Совет
Увеличение разрешения выше HD не приведёт к обнаружению объектов меньшего размера или большего количества объектов, по сравнению с HD.
Рекомендуемое соотношение сторон кадра — 16:9.
Предупреждение
При другом соотношении сторон кадра точность распознавания объектов может понизиться.
Изображение🔗
Освещение в кадре должно быть равномерным и постоянным.
Если камера установлена напротив яркого источника света (солнце за дверью входа и т.п.), то необходимо настроить экспозицию (или яркость) таким образом, чтобы объекты в кадре имели естественный цвет (не были пересвечены или затемнены). При этом допускается пересвеченный фон.
Изображение должно быть цветным.
Качество изображения должно быть не ниже среднего. Не должно быть существенных артефактов сжатия.
Для режимов, использующих нейросети:
Должен быть корректно настроен баланс белого.
Объект должен быть виден с подходящего ракурса, при котором он будет хорошо отличим от фона и отчётливо виден при наблюдении человеческим глазом.
Для поиска людей:
Не допускается сильный боковой источник света (солнечный свет из окна), из-за которого одна половина человека оказывается пересвеченной, а другая — затемнённой.
Для поиска объектов различных категорий и определения типов и различных характеристик объектов:
Объект должен быть виден с подходящего ракурса, при котором он будет хорошо отличим от фона и отчётливо виден при наблюдении человеческим глазом.
Сцена и расположение камеры🔗
Объекты должны быть видны в кадре полностью.
Допускается размещать камеру сверху. При этом угол наклона камеры от горизонтали не должен превышать 35°.
Объекты должны быть видны в кадре полностью.
Камера должна быть надёжно зафиксирована, не допускаются покачивания и колебания камеры.
Для поиска людей:
Люди должны быть видны в полный рост.
Для поиска транспортных средств:
Установка камеры под углом к оси движения транспортных средств обеспечивает наиболее выгодный ракурс.
Предупреждение
Недопустимо использование модуля Поиск объектов на поворотных камерах PTZ.
Размеры объекта🔗
Для успешного обнаружения объектов их размеры должен соответствовать следующим требованиям:
Люди должны занимать не менее 2% ширины и 8% высоты кадра.
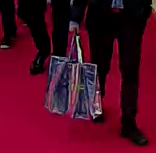
Сумки (включая рюкзаки и чемоданы) – не менее 4% ширины и 9% высоты кадра.
Легковые автомобили – не менее 4% ширины и 4% высоты кадра.
Грузовые автомобили – не менее 7% ширины и 9% высоты кадра.
Автобусы – не менее 5% ширины и 7% высоты кадра.
Двухколёсный транспорт (велосипеды, мотоциклы) – не менее 3% ширины и 7% высоты кадра.
Животные – не менее 4% ширины и 6% высоты кадра.
Оружие – не менее 12% ширины и 12% высоты кадра.
Предупреждение
Вышеперечисленные требования к размерам объектов в % от размеров кадра являются минимально обеспечивающими наилучшее качество распознавания при оптимальных условиях. При уменьшении относительных размеров объектов от требуемых качество работы модуля по таким объектам будет снижаться.
Качество работы модуля, дополнительные требования и примеры изображений🔗
Минимальные требования, обеспечивающие поиск транспортных средств по цвету:
Транспортное средство должно быть окрашено в единый цвет, без пёстрых наклеек или разноцветного окраса.
Транспортное средство должно быть зафиксировано в светлое время суток в хорошую погоду.
Экспозиция и контраст на камере должны быть настроены таким образом, чтобы можно было однозначно определить человеческим глазом цвет объекта.
Корпус транспортного средства не должен быть засвечен светом фар или другими отблесками света, в том числе — солнечного.
Ракурс, в котором было зафиксировано транспортное средство, должен позволять корректно определить преобладающий цвет объекта (например, если автомобиль виден сзади, бампер окрашен в тёмный цвет и затонировано заднее стекло, то цвет автомобиля может быть определён как чёрный).
Ниже представлены примеры хороших и плохих ракурсов для определения типа транспортного средства. Чем лучше ракурс, тем выше будет точность определения типа проезжающего транспортного средства. В среднем, при хороших условиях, точность определения типа транспортного средства составляет около 80%.
Хороший ракурс |
Плохой ракурс |
|---|---|
|
|
|
|
|
|






Предупреждение
При использовании расширенного поиска по категории Транспорт к объектам типа Двухколёсный транспорт могут быть ошибочно отнесены следующие объекты:
Люди, снятые в плохом качестве, которые по различным причинам могут быть восприняты сидящими на двухколёсном транспортном средстве. Например, люди на заднем плане, сидящие в кресле с загнутыми ручками или держащиеся за поручни.
Примеры:



Коляски с детьми, люди в инвалидных колясках и другие похожие комбинации (человек + колесо)
Пример:

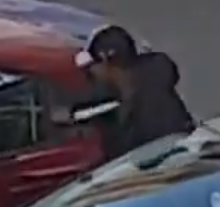
Точность поиска других объектов существенно зависит от качества изображения, размера объекта в кадре, а также от ракурса, под которым этот объект виден. В подходящих условиях точность поиска других объектов может достигать от 40% до 60%, в зависимости от степени видимости объекта в кадре и его размеров (например, частично скрытое оружие или спрятанный за угол чемодан будут обнаруживаться с гораздо меньшей вероятностью, чем хорошо различимые предметы того же типа). При этом для данной категории объектов свойственно большее число ложных срабатываний, чем для других.
Ниже представлены примеры хороших и плохих ракурсов для поиска других объектов.
Хороший ракурс |
Плохой ракурс |
|---|---|
|
|
|
|
|
|